-
1 typical valuation
English-Russian dictionary of telecommunications and their abbreviations > typical valuation
-
2 bogey value
1) Техника: номинальное значение (параметра), среднее значение2) Электроника: среднее или типовое значение, типовое значение3) Метрология: типовое значение (например, крутизны характеристики лампы)4) Электротехника: среднее значение (параметра) -
3 bogey
1) Общая лексика: двухосная тележка (паровоза), домовой, дьявол, жупел, каретка, наивысший уровень выработки, предельный уровень выработки, привидение, пугало, тележка, (Br and Aus) козюлька (slang, 'g' is pronounced as in 'give'), нечисть2) Военный термин: "неопознанный самолёт", опорный каток, самолёт противника, "самолёт противника" (код)3) Экономика: наивысший уровень выработки, неофициально установленный рабочими предприятия, предельный уровень выработки, неофициально установленный рабочими предприятия5) Детская речь: бука6) Электроника: среднее или типовое значение7) Инвестиции: "призрак"8) Макаров: болотистый, болотный, вагонетка, дряблый, заболоченный, рыхлый, ходовая тележка рельсового крана, понос (детский), среднее значение (параметров лампы), типовое значение (параметров лампы), тележка (пневмоколёсного ходового устройства крана)9) Табуированная лексика: комочек затвердевшей носовой слизи -
4 typ
-
5 bandwidth-distance factor
коэффициент BDF
Параметр, характеризующий частотные свойства волоконно-оптического кабеля с учетом его длины. Типовое значение BDF y многомодовых волокон изменяется в пределах от 200 до 800 МГц-км. Одномодовые волокна более широкополосны по сравнению с многомодовыми; значение BDF может достигать 50-100 ГГц-км.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > bandwidth-distance factor
-
6 BDF
- расход через дренажи слоя
- распределительный щит здания
- коэффициент снижения мощности котла
- коэффициент BDF
коэффициент BDF
Параметр, характеризующий частотные свойства волоконно-оптического кабеля с учетом его длины. Типовое значение BDF y многомодовых волокон изменяется в пределах от 200 до 800 МГц-км. Одномодовые волокна более широкополосны по сравнению с многомодовыми; значение BDF может достигать 50-100 ГГц-км.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
коэффициент снижения мощности котла
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
распределительный щит здания
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
расход через дренажи слоя
(топки котла с циркулирующим кипящим слоем)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > BDF
-
7 typical valuation
Телекоммуникации: типовое значение -
8 bogey
среднее или типовое значение ( параметров лампы) -
9 bogey
среднее или типовое значение ( параметров лампы)The New English-Russian Dictionary of Radio-electronics > bogey
-
10 bogey
-
11 bogey value
-
12 wet contact
- смачиваемый (магнитоуправляемый) контакт
- контакт, пропускающий ток
контакт, пропускающий ток
“мокрый” контакт (проф.)
Контакт, который в нормальном (замкнутом) положении пропускает ток. Термин обычно употребляется в сетях проводной связи, когда питание необслуживаемых модулей (повторителей и др.) осуществляется непосредственно по линии передачи данных. Типовое значение пропускаемого по линии тока составляет 60-140 мА.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
Синонимы
- “мокрый” контакт (проф.)
EN
смачиваемый (магнитоуправляемый) контакт
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > wet contact
-
13 nominal operating tensile strength
номинальная эксплуатационная прочность на растяжение
Максимальное среднее рабочее усилие, которое кабель может выдерживать в течение периода времени, требующегося для операций в море (типовое значение 48 часов) без существенного снижения характеристик системы, срока службы и надежности. NOTS представляет собой максимальное среднее рабочее усилие во время установки или ремонта. NOTS также известно как рабочая нагрузка кабеля (МСЭ-Т G.972).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > nominal operating tensile strength
-
14 NOTS
номинальная эксплуатационная прочность на растяжение
Максимальное среднее рабочее усилие, которое кабель может выдерживать в течение периода времени, требующегося для операций в море (типовое значение 48 часов) без существенного снижения характеристик системы, срока службы и надежности. NOTS представляет собой максимальное среднее рабочее усилие во время установки или ремонта. NOTS также известно как рабочая нагрузка кабеля (МСЭ-Т G.972).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > NOTS
-
15 SINAD (Signal-to-Noise-And-Distortion) ratio
- отношение суммы мощностей сигнала, шума и искажений к сумме мощностей шума и искажений
отношение суммы мощностей сигнала, шума и искажений к сумме мощностей шума и искажений
Показатель, применяемый для оценки реальной чувствительности аналоговых радиостанций. Отношение SINAD измеряется на выходе низкочастотного тракта приемника и характеризует такой минимально допустимый уровень принимаемого сигнала, при котором обеспечивается заданное качество связи. Для аналоговых узкополосных радиостанций с частотной модуляцией типовое значение SINAD равно 12 дБ.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > SINAD (Signal-to-Noise-And-Distortion) ratio
-
16 surge
- помпаж
- перенапряжение
- колебание (числа оборотов турбины)
- импульсное перенапряжение
- значительное колебание оборотов (двигателя)
- гидравлический удар
- выброс тока
- выброс напряжения
- бросок напряжения
бросок напряжения
Волна напряжения переходного процесса, распространяющаяся по линии или по цепи и характеризующаяся быстрым нарастанием, за которым следует более медленное снижение напряжения (МСЭ-Т K.43, МСЭ-Т K.48).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
выброс напряжения
Динамическое изменение напряжения в сети электропитания в виде повышения напряжения за верхний допустимый предел.
[ ГОСТ 19542-93]Выброс напряжения – динамическое кратковременное отклонение напряжения с последующим возвращением к исходному значению.
В отличие от заброса напряжения причинами выброса напряжения могут быть не только изменение нагрузки, но и повреждения электрических сетей, процессы коммутации и др.
С точки зрения электромагнитной совместимости выброс напряжения рассматривается как помеха, воздействующая на работу технического средства. По длительности и амплитуде выброса напряжения нормативные документы различают несколько степеней жесткости испытаний.
При испытаниях на устойчивость ТС должно быть подвергнуто воздействию выбросов напряжения не менее трёх раз, с интервалом между ними не менее 10 с.
Информация об устойчивости цифровых устройств релейной защиты к выбросам напряжения содержится в работе [3].
Литература
1. ГОСТ Р 51317.4.1-99 (МЭК 61000-4-11-94). Устойчивость к динамическим изменениям напряжения электропитания. Требования и методы испытаний.
2. ГОСТ Р 50932-96 Совместимость технических средств электромагнитная. Устойчивость оборудования проводной связи к электромагнитным помехам. Требования и методы испытаний
3. Захаров О.Г. Требования к портам оперативного питания в технических условиях цифровых устройств релейной защиты. // Вести в электроэнергетике. №5, 2010.//Статью также можно прочесть и на портале «Всё о релейной защите» http://www.rza.org.ua
4. ГОСТ 23875-88 Качество электрической энергии.Термины и определения [2].
5. РД 34.35.310-97. Общие технические требования к микропроцессорным устройствам защиты и автоматики энергосистем. М.: ОРГГЭС, 1997 (с изменением №1).
[ http://maximarsenev.narod.ru/links.html]
Тематики
EN
выброс тока
бросок тока
экстраток
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
Синонимы
EN
гидравлический удар
Резкое повышение или понижение давления движущейся жидкости при внезапном уменьшении или увеличении скорости потока
[ ГОСТ 26883-86]
гидравлический удар
Удар, создаваемый путем повышения или понижения гидромеханического давления в напорном трубопроводе, вызываемого изменением во времени скорости движения жидкости (газа) в сечении трубопровода.
[ ГОСТ 15528-86]
гидравлический удар
Повышение или понижение гидродинамического давления в напорном трубопроводе, вызванное резким изменением во времени скорости движения жидкости в каком-либо сечении трубопровода.
Примечание
Гидравлический удар имеет место при открытии или закрытии затворов, направляющих аппаратов турбин и т.п.
[СО 34.21.308-2005]
удар гидравлический
Резкое повышение давления жидкости в трубопроводе при внезапном изменении скорости потока в случае остановки насосов или быстрого перекрытия трубопровода
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]Тематики
- внешние воздействующие факторы
- гидравлика и пневматика
- гидропривод объемный и пневмопривод
- гидротехника
- измерение расхода жидкости и газа
Обобщающие термины
EN
- hammer blow
- hydraulic hammer
- hydraulic impact
- hydraulic shock
- hydraulic transient
- jar of water
- knocking
- pressure shock
- pressure surge
- reverberation
- surge
- surging shock
- transient shock
- water hammer
- water hammering
- water ram
DE
FR
значительное колебание оборотов (двигателя)
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
импульсное перенапряжение
В настоящее время в различных литературных источниках для описания процесса резкого повышения напряжения используются следующие термины:- перенапряжение,
- временное перенапряжение,
- импульс напряжения,
- импульсная электромагнитная помеха,
- микросекундная импульсная помеха.
Мы в своей работе будем использовать термин « импульсное перенапряжение», понимая под ним резкое изменение напряжения с последующим восстановлением
амплитуды напряжения до первоначального или близкого к нему уровня за промежуток времени до нескольких миллисекунд вызываемое коммутационными процессами в электрической сети или молниевыми разрядами.
В соответствии с классификацией электромагнитных помех [ ГОСТ Р 51317.2.5-2000] указанные помехи относятся к кондуктивным высокочастотным переходным электромагнитным апериодическим помехам.
[Техническая коллекция Schneider Electric. Выпуск № 24. Рекомендации по защите низковольтного электрооборудования от импульсных перенапряжений]EN
surge
spike
Sharp high voltage increase (lasting up to 1mSec).
[ http://www.upsonnet.com/UPS-Glossary/]Параллельные тексты EN-RU
The Line-R not only adjusts voltages to safe levels, but also provides surge protection against electrical surges and spikes - even lightning.
[APC]Автоматический регулятор напряжения Line-R поддерживает напряжение в заданных пределах и защищает цепь от импульсных перенапряжений, в том числе вызванных грозовыми разрядами.
[Перевод Интент]
Surges are caused by nearby lightning activity and motor load switching
created by air conditioners, elevators, refrigerators, and so on.
[APC]
ВОПРОС: ЧТО ЯВЛЯЕТСЯ ИСТОЧНИКОМ ИМПУЛЬСНЫХ ПЕРЕНАПРЯЖЕНИЙ И ПОМЕХ?
Основных источников импульсов перенапряжений - всего два.
1. Переходные процессы в электрической цепи, возникающие вследствии коммутации электроустановок и мощных нагрузок.
2. Атмосферный явления - разряды молнии во время грозыВОПРОС: КАК ОПАСНОЕ ИМПУЛЬСНОЕ ПЕРЕНАПРЯЖЕНИЕ МОЖЕТ ПОПАСТЬ В МОЮ СЕТЬ И НАРУШИТЬ РАБОТУ ОБОРУДОВАНИЯ?
Импульс перенапряжения может пройти непосредственно по электрическим проводам или шине заземления - это кондуктивный путь проникновения.
Электромагнитное поле, возникающее в результате импульса тока, индуцирует наведенное напряжение на всех металлических конструкциях, включая электрические линии - это индуктивный путь попадания опасных импульсов перенапряжения на защищаемый объект.ВОПРОС: ПОЧЕМУ ПРОБЛЕМА ЗАЩИТЫ ОТ ИМПУЛЬСНЫХ ПЕРЕНАПРЯЖЕНИЙ ОСТРО ВСТАЛА ИМЕННО В ПОСЛЕДНЕЕ ВРЕМЯ?
Эта проблема приобрела актуальность в связи с интенсивным внедрением чувствительной электроники во все сферы жизни. Учитывая возросшее количество информационных линий (связь, телевидение, интернет, ЛВС и т.д.) как в промышленности, так и в быту, становится понятно, почему защита от импульсных перенапряжений и приобрела сейчас такую актуальность.[ http://www.artterm-m.ru/index.php/zashitaseteji1/faquzip]
Защита от импульсного перенапряжения. Ограничитель перенапряжения - его виды и возможности
Перенапряжением называется любое превышение напряжения относительно максимально допустимого для данной сети. К этому виду сетевых помех относятся как перенапряжения связанные с перекосом фаз достаточно большой длительности, так и перенапряжения вызванные грозовыми разрядами с длительностью от десятков до сотен микросекунд. Методы и средства борьбы зависят от длительности и амплитуды перенапряжений. В этом отношении импульсные перенапряжения можно выделить в отдельную группу.
Под импульсным перенапряжением понимается кратковременное, чрезвычайно высокое напряжение между фазами или фазой и землей с длительностью, как правило, до 1 мс.
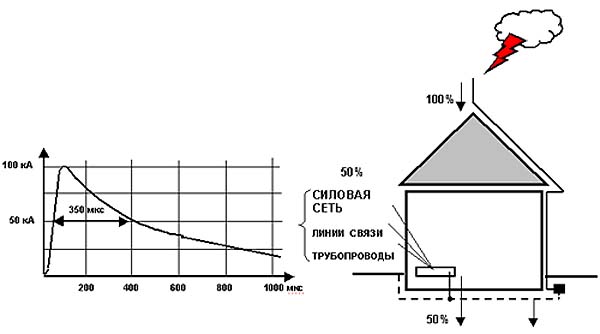
Грозовые разряды - мощные импульсные перенапряжения возникающие в результате прямого попадания молнии в сеть электропитания, громоотвод или импульс от разряда молнии на расстоянии до 1,5 км приводящий к выходу из строя электрооборудования или сбою в работе аппаратуры. Прямое попадание характеризуется мгновенными импульсными токами до 100 кА с длительностью разряда до 1 мС.
При наличии системы громоотвода импульс разряда распределяется между громоотводом, сетью питания, линиями связи и бытовыми коммуникациями. Характер распределения во многом зависит от конструкции здания, прокладки линий и коммуникаций.
Переключения в энергосети вызывают серию импульсных перенапряжений различной мощности, сопровождающуюся радиочастотными помехами широкого спектра. Природа возникновения помех приведена на примере ниже.
Например при отключении разделительного трансформатора мощностью 1кВА 220\220 В от сети вся запасенная трансформатором энергия "выбрасывается" в нагрузку в виде высоковольтного импульса напряжением до 2 кВ.
Мощности трансформаторов в энергосети значительно больше, мощнее и выбросы. Кроме того переключения сопровождаются возникновением дуги, являющейся источником радиочастотных помех.
Электростатический заряд, накапливающийся при работе технологического оборудования интересен тем, что хоть и имеет небольшую энергию, но разряжается в непредсказуемом месте.
Форма и амплитуда импульсного перенапряжения зависят не только от источника помехи, но и от параметров самой сети. Не существует два одинаковых случая импульсного перенапряжения, но для производства и испытания устройств защиты введена стандартизация ряда характеристик тока, напряжения и формы перенапряжения для различных случаев применения.
Так для имитации тока разряда молнии применяется импульс тока 10/350 мкс, а для имитации косвенного воздействия молнии и различных коммутационных перенапряжений импульс тока с временными характеристиками 8/20 мкс.
Таким образом, если сравнить два устройства с максимальным импульсным током разряда 20 кА при 10/ 350 мкс и 20 кА при импульсе 8/20 мкс у второго, то реальная "мощность" первого примерно в 20 раз больше.
Существует четыре основных типа устройств защиты от импульсного перенапряжения:
1. Разрядник
Представляет собой ограничитель перенапряжения из двух токопроводящих пластин с калиброванным зазором. При существенном повышении напряжения между пластинами возникает дуговой разряд, обеспечивающий сброс высоковольтного импульса на землю. По исполнению разрядники делятся на воздушные, воздушные многоэлектродные и газовые. В газовом разряднике дуговая камера заполнена инертным газом низкого давления. Благодаря этому их параметры мало зависят от внешних условий (влажность, температура, запыленность и т.д.) кроме этого газовые разрядники имеют экстремально высокое сопротивление (около 10 ГОм), что позволяет их применять для защиты от перенапряжения высокочастотных устройств до нескольких ГГц.При установке воздушных разрядников следует учитывать выброс горячего ионизированного газа из дуговой камеры, что особенно важно при установке в пластиковые щитовые конструкции. В общем эти правила сводятся к схеме установки представленной ниже.
Типовое напряжение срабатывания в для разрядников составляет 1,5 - 4 кВ (для сети 220/380 В 50 Гц). Время срабатывания порядка 100 нс. Максимальный ток при разряде для различных исполнений от 45 до 60 кА при длительности импульса 10/350 мкс. Устройства выполняются как в виде отдельных элементов для установки в щиты, так и в виде модуля для установки на DIN - рейку. Отдельную группу составляют разрядники в виде элементов для установки на платы с токами разряда от 1 до 20 кА (8/20 мкс).
2. Варистор
Керамический элемент, у которого резко падает сопротивление при превышении определенного напряжения. Напряжение срабатывания 470 - 560 В (для сети 220/380 В 50 Гц).Время срабатывания менее 25 нс. Максимальный импульсный ток от 2 до 40 кА при длительности импульса 8/20 мкс.
Устройства выполняются как в виде отдельных элементов для установки в радиоаппаратуру, так и в виде DIN - модуля для установки в силовые щиты.
3. Разделительный трансформатор
Эффективный ограничитель перенапряжения - силовой 50 герцовый трансформатор с раздельными обмотками и равными входным и выходным напряжениями. Трансформатор просто не способен передать столь короткий высоковольтный импульс во вторичную обмотку и благодаря этому свойству является в некоторой степени идеальной защитой от импульсного перенапряжения.Однако при прямом попадании молнии в электросеть может нарушиться целостность изоляции первичной обмотки и трансформатор выходит из строя.
4. Защитный диод
Защита от перенапряжения для аппаратуры связи. Обладает высокой скоростью срабатывания (менее 1 нс) и разрядным током 1 кА при токовом импульсе 8/20 мкс.Все четыре выше описанные ограничителя перенапряжения имеют свои достоинства и недостатки. Если сравнить разрядник и варистор с одинаковым максимальным импульсным током и обратить внимание на длительность тестового импульса, то становится ясно, что разрядник способен поглотить энергию на два порядка больше, чем варистор. Зато варистор срабатывает быстрее, напряжение срабатывания существенно ниже и гораздо меньше помех при работе.
Разделительный трансформатор, при определенных условиях, имеет безграничный ресурс по защите нагрузки от импульсного перенапряжения (у варисторов и разрядников при срабатывании происходит постепенное разрушение материала элемента), но для сети 100 кВА требуется трансформатор 100кВА (тяжелый, габаритный и довольно дорогой).
Следует помнить, что при отключении первичной сети трансформатор сам по себе генерирует высоковольтный выброс, что требует установки варисторов на выходе трансформатора.
Одной из серьезных проблем в процессе организации защиты оборудования от грозового и коммутационного перенапряжения является то, что нормативная база в этой области до настоящего времени разработана недостаточно. Существующие нормативные документы либо содержат в себе устаревшие, не соответствующие современным условиям требования, либо рассматривают их частично, в то время как решение данного вопроса требует комплексного подхода. Некоторые документы в данный момент находятся в стадии разработки и есть надежда, что они вскоре выйдут в свет. В их основу положены основные стандарты и рекомендации Международной Электротехнической Комиссии (МЭК).
[ http://www.higercom.ru/products/support/upimpuls.htm]
Чем опасно импульсное перенапряжение для бытовых электроприборов?
Изоляция любого электроприбора рассчитана на определенный уровень напряжения. Как правило электроприборы напряжением 220 – 380 В рассчитаны на импульс перенапряжения около 1000 В. А если в сети возникают перенапряжения с импульсом 3000 В? В этом случае происходит пробои изоляции. Возникает искра – ионизированный промежуток воздуха, по которому протекает электрический ток. В следствии этого – электрическая дуга, короткое замыкание и пожар.
Заметьте, что прибой изоляции может возникнуть, даже если у вас все приборы отключены от розеток. Под напряжением в доме все равно останутся электропроводка, распределительные коробки, те же розетки. Эти элементы сети также не защищены от импульсного перенапряжения.
Причины возникновения импульсного перенапряжения.
Одна из причин возникновения импульсных перенапряжений это грозовые разряды (удары молнии). Коммутационные перенапряжения которые возникают в результате включения/отключения мощной нагрузки. При перекосе фаз в результате короткого замыкания в сети.
Защита дома от импульсных перенапряжений
Избавиться от импульсных перенапряжений - невозможно, но для того чтобы предотвратить пробой изоляции существуют устройства, которые снижают величину импульсного перенапряжения до безопасной величины.
Такими устройствами защиты являются УЗИП - устройство защиты от импульсных перенапряжений.
Существует частичная и полная защита устройствами УЗИП.
Частичная защита подразумевает защиту непосредственно от пробоя изоляции (возникновения пожара), в этом случае достаточно установить один прибор УЗИП на вводе электрощитка (защита грубого уровня).
При полной защите УЗИП устанавливается не только на вводе, но и возле каждого потребителя домашней электросети (телевизора, компьютера, холодильника и т.д.) Такой способ установки УЗИП дает более надежную защиту электрооборудованию.
[ Источник]
Тематики
EN
колебание (числа оборотов турбины)
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
перенапряжение в системе электроснабжения
Превышение напряжения над наибольшим рабочим напряжением, установленным для данного электрооборудования.
[ ГОСТ 23875-88]
перенапряжение
Напряжение между двумя точками электротехнического изделия (устройства), значение которого превосходит наибольшее рабочее значение напряжения.
[ ГОСТ 18311-80]
перенапряжение (в сети)
Любое напряжение между одной фазой и землей или между фазами, имеющее значение, превышающее соответствующий пик наибольшего рабочего напряжения оборудования
[ ГОСТ Р 52565-2006]
перенапряжение
Всякое повышение напряжения сверх амплитуды длительно допустимого рабочего фазного напряжения.
[Методические указания по защите распределительных электрических сетей напряжением 0,4-10 кВ от грозовых перенапряжений]
перенапряжение
Временное увеличение напряжения в конкретной точке электрической системы выше порогового значения.
[ ГОСТ Р 51317.4.30-2008 (МЭК 61000-4-30:2008)]
перенапряжение
Возникновение избыточного напряжения, возникающего при сбросе нагрузки или кратковременном воздействии мощных помех. Одним из основных источников перенапряжения являются грозовые разряды в атмосфере, которые могут повредить интерфейсное оборудование, подключенное к кабельным линиям связи.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]
перенапряжение
-
[IEV number 151-15-27]EN
over-voltage
over-tension
voltage the value of which exceeds a specified limiting value
[IEV number 151-15-27]
voltage swell
temporary increase of the voltage magnitude at a point in the electrical system above a threshold
[IEC 61000-4-30, ed. 2.0 (2008-10)]FR
surtension, f
tension électrique dont la valeur dépasse une valeur limite spécifiée
[IEV number 151-15-27]
surtension temporaire à fréquence industrielle
augmentation temporaire de l’amplitude de la tension en un point du réseau d’énergie électrique au-dessus d’un seuil donné
[IEC 61000-4-30, ed. 2.0 (2008-10)]Тематики
- качество электрической энергии
- электросвязь, основные понятия
- электроустановки
Синонимы
Сопутствующие термины
EN
- o.v.
- over voltage
- over-tension
- over-voltage
- overpotential
- overvoltage
- ovv
- super potential
- supertension
- surge
- voltage overload
- voltage swell
DE
FR
- surtension temporaire à fréquence industrielle
- surtension, f
Смотри также
помпаж
Неустойчивый режим работы турбокомпрессора, характеризующийся последовательно чередующимся нагнетанием газа в сеть и выбрасыванием газа из сети на всасывание.
[ ГОСТ 28567-90]Тематики
EN
3.1.24 импульсное перенапряжение (surge): Резкий подъем напряжения, вызванный электромагнитным импульсом удара молнии и проявляющийся в виде повышения электрического напряжения или тока до значений, представляющих опасность для изоляции или потребителя.
Источник: ГОСТ Р МЭК 62305-2-2010: Менеджмент риска. Защита от молнии. Часть 2. Оценка риска оригинал документа
3.35 импульсное перенапряжение (surge): Резкий подъем напряжения, вызванный электромагнитным импульсом удара молнии и проявляющийся в виде повышения электрического напряжения или тока до значений, представляющих опасность для изоляции или потребителя.
Источник: ГОСТ Р МЭК 62305-1-2010: Менеджмент риска. Защита от молнии. Часть 1. Общие принципы оригинал документа
Англо-русский словарь нормативно-технической терминологии > surge
17 nominal d.c. spark-over voltage
номинальное значение постоянного напряжения пробоя
Напряжение, установленное изготовителем для обозначения типа газоразрядной трубки (типовое обозначение) и указания возможностей ее применения в зависимости от условий эксплуатации установки, для защиты которой она предназначена. Допустимые предельные значения постоянного напряжения пробоя также относятся к номинальному значению этого напряжения (МСЭ-Т K.12).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
- nominal d.c. spark-over voltage
Англо-русский словарь нормативно-технической терминологии > nominal d.c. spark-over voltage
18 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
19 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
20 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
Страницы- 1
- 2
См. также в других словарях:
словообразовательное значение — 1. Значение словообразовательного типа. 2. Словообразовательное значение морфемы – общее типовое значение, извлеченное из ряда частных словообразовательных значений, близких по структуре слов. Тип языкового значения, представленный в… … Морфемика. Словообразование: Словарь-справочник
ОСТ 153-39.2-048-2003: Нефть. Типовое исследование пластовых флюидов и сепарированных нефтей. Объем исследований и формы представления результатов — Терминология ОСТ 153 39.2 048 2003: Нефть. Типовое исследование пластовых флюидов и сепарированных нефтей. Объем исследований и формы представления результатов: 14.2 Форма 1 «Титульный лист». Содержит четыре поля. поле 1 (вверху листа)… … Словарь-справочник терминов нормативно-технической документации
номинальное значение постоянного напряжения пробоя — Напряжение, установленное изготовителем для обозначения типа газоразрядной трубки (типовое обозначение) и указания возможностей ее применения в зависимости от условий эксплуатации установки, для защиты которой она предназначена. Допустимые… … Справочник технического переводчика
Синонимы — (от греч. synônymia – одноименность) – тождественные или близкие по значению (но разные по звучанию) единицы языка одного уровня (морфемы, слова и словосочетания, синтаксические конструкции). С. чаще всего называют близкие или тождественные по… … Стилистический энциклопедический словарь русского языка
Бальзак О. де — БАЛЬЗАК Оноре де (Honoré de Balzac, 20/V 1799–20/VIII 1850). Родился в Туре, учился в Париже. Юношей работал у нотариуса, готовясь к карьере нотариуса или поверенного. 23–26 лет напечатал ряд романов под различными псевдонимами, не поднимавшихся… … Литературная энциклопедия
коэффициент BDF — Параметр, характеризующий частотные свойства волоконно оптического кабеля с учетом его длины. Типовое значение BDF y многомодовых волокон изменяется в пределах от 200 до 800 МГц км. Одномодовые волокна более широкополосны по сравнению с… … Справочник технического переводчика
Дюралюминий — Дюралюминий торговая марка одного из первых упрочняемых старением алюминиевых сплавов. Основными легирующими элементами являются медь (4,5 % массы), магний (1,6 %) и марганец (0,7 %). Типовое значение предела текучести… … Википедия
Коммутация (компьютерные сети) — У этого термина существуют и другие значения, см. Коммутация. Эта статья или раздел нуждается в переработке. Пожалуйста, улучшите статью … Википедия
Летающая подводная лодка — Проект ЛПЛ Ушакова Летающая подводная лодка летательный аппарат, совместивший в себе способность гидроплана совершать взлёт и посадку на воду и способность подводной лодки передвигаться в подводном положении. Поскольку требования,… … Википедия
Смеситель (электроника) — У этого термина существуют и другие значения, см. Смеситель. Смесители являются ключевым элементом преобразователей частоты в современных радиоприёмных устройствах. Смесители подразделяются на два основных типа: Аддитивные, в которых суммируется… … Википедия
Дураль — Дюралюминий Торговая марка одного из первых упрочняемых старением алюминиевых сплавов. Основными легирующими элементами являются медь (4,4% массы), магний (1,5%) и марганец (0,5%). Типовое значение предела текучести составляет 450 МПа, однако… … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на все языки
со всех языков на английский- Со всех языков на:
- Английский
- С английского на:
- Русский